|
Luisa Chiu Portfolio
|


|
|
Luisa Chiu Portfolio
|
|
User interface task for cooperative multitasking example. More...
Classes | |
| class | Lab4_task_userinterface.Task_User |
| User interface task for data collection and interaction with task encoder, task motor, and task motor driver. More... | |
Variables | |
| int | Lab4_task_userinterface.S0_init = 0 |
| State 0 of the user interface task. More... | |
| int | Lab4_task_userinterface.S1_wait_for_char = 1 |
| State 1 of the user interface task. More... | |
| int | Lab4_task_userinterface.S2_collect_data_1 = 2 |
| State 2 of the user interface task. More... | |
| int | Lab4_task_userinterface.S3_collect_data_2 = 3 |
| State 3 of the user interface task. More... | |
| int | Lab4_task_userinterface.S4_print_data_1 = 4 |
| State 4 of the user interface task. More... | |
| int | Lab4_task_userinterface.S5_print_data_2 = 5 |
| State 5 of the user interface task. More... | |
| int | Lab4_task_userinterface.S6_zero_enc_1 = 6 |
| State 6 of the user interface task. More... | |
| int | Lab4_task_userinterface.S7_zero_enc_2 = 7 |
| State 7 of the user interface task. More... | |
| int | Lab4_task_userinterface.S8_print_enc_pos_1 = 8 |
| State 8 of the user interface task. More... | |
| int | Lab4_task_userinterface.S9_print_enc_pos_2 = 9 |
| State 9 of the user interface task. More... | |
| int | Lab4_task_userinterface.S10_print_enc_delta_1 = 10 |
| State 10 of the user interface task. More... | |
| int | Lab4_task_userinterface.S11_print_enc_delta_2 = 11 |
| State 11 of the user interface task. More... | |
| int | Lab4_task_userinterface.S12_enable = 12 |
| State 12 of the user interface task. More... | |
| int | Lab4_task_userinterface.S13_input_gain_1 = 13 |
| State 13 of the user interface task. More... | |
| int | Lab4_task_userinterface.S14_input_gain_2 = 14 |
| State 14 of the user interface task. More... | |
| int | Lab4_task_userinterface.S15_input_vel_1 = 15 |
| State 15 of the user interface task. More... | |
| int | Lab4_task_userinterface.S16_input_vel_2 = 16 |
| State 16 of the user interface task. More... | |
| int | Lab4_task_userinterface.S17_fault_occurs = 17 |
| State 17 of the user interface task. More... | |
| int | Lab4_task_userinterface.S18_fault_cleared = 18 |
| State 18 of the user interface task. More... | |
| int | Lab4_task_userinterface.S19_step_response_1 = 19 |
| State 19 of the user interface task. More... | |
| int | Lab4_task_userinterface.S20_step_response_2 = 20 |
| State 20 of the user interface task. More... | |
| int | Lab4_task_userinterface.S21_step_print = 21 |
| State 21 of the user interface task. More... | |
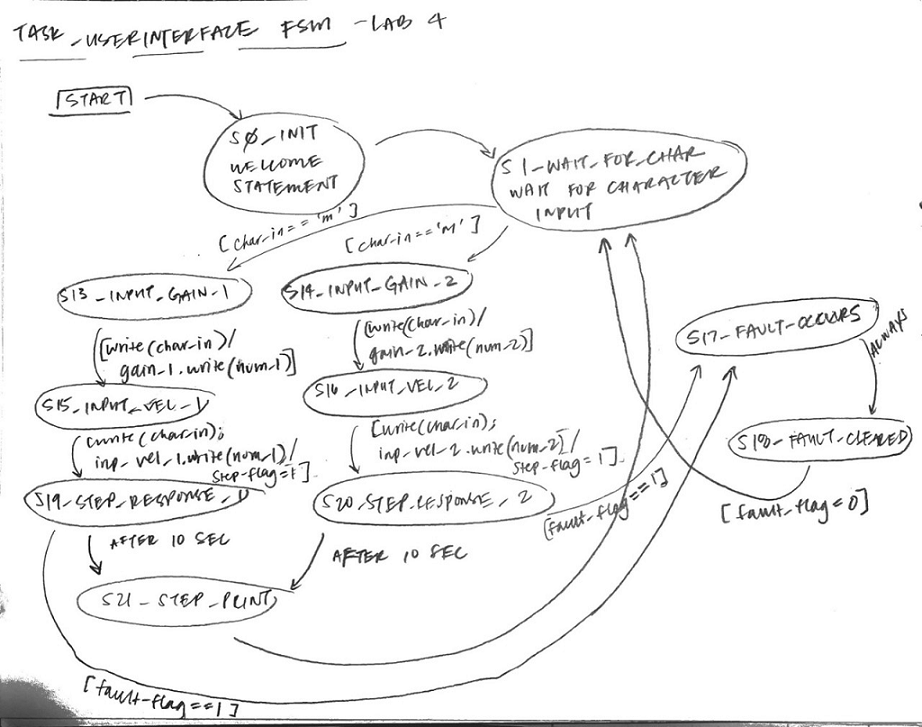
User interface task for cooperative multitasking example.
Implements a finite state machine that runs a data collection interface to interact with the encoder, motor, motor driver, and controller.
| int Lab4_task_userinterface.S0_init = 0 |
State 0 of the user interface task.
Creates an initial state condition for state 0.
| int Lab4_task_userinterface.S10_print_enc_delta_1 = 10 |
State 10 of the user interface task.
Creates an initial state condition for state 10. State 10 prints encoder 1 delta.
| int Lab4_task_userinterface.S11_print_enc_delta_2 = 11 |
State 11 of the user interface task.
Creates an initial state condition for state 11. State 11 prints encoder 2 delta.
| int Lab4_task_userinterface.S12_enable = 12 |
State 12 of the user interface task.
Creates an initial state condition for state 12. State 12 enables motors 1 and 2.
| int Lab4_task_userinterface.S13_input_gain_1 = 13 |
State 13 of the user interface task.
Creates an initial state condition for state 13. State 13 prompts user input for the proportional gain for motor 1.
| int Lab4_task_userinterface.S14_input_gain_2 = 14 |
State 14 of the user interface task.
Creates an initial state condition for state 14. State 14 prompts user input for the proportional gain for motor 2.
| int Lab4_task_userinterface.S15_input_vel_1 = 15 |
State 15 of the user interface task.
Creates an initial state condition for state 15. State 15 prompts user input for the angular velocity setpoint for motor 1.
| int Lab4_task_userinterface.S16_input_vel_2 = 16 |
State 16 of the user interface task.
Creates an initial state condition for state 16. State 16 prompts user input for the angular velocity setpoint for motor 2.
| int Lab4_task_userinterface.S17_fault_occurs = 17 |
State 17 of the user interface task.
Creates an initial state condition for state 17. State 17 alerts user of a fault condition.
| int Lab4_task_userinterface.S18_fault_cleared = 18 |
State 18 of the user interface task.
Creates an initial state condition for state 18. State 18 tells user that the fault condition is cleared.
| int Lab4_task_userinterface.S19_step_response_1 = 19 |
State 19 of the user interface task.
Creates an initial state condition for state 19. State 19 runs the step_response for 10 seconds; it collects and stores time, measured velocity, and PWM level for motor 1.
| int Lab4_task_userinterface.S1_wait_for_char = 1 |
State 1 of the user interface task.
Creates an initial state condition for state 1. This state waits for user input.
| int Lab4_task_userinterface.S20_step_response_2 = 20 |
State 20 of the user interface task.
Creates an initial state condition for state 20. State 20 runs the step_response for 10 seconds; it collects and stores time, measured velocity, and PWM level for motor 2.
| int Lab4_task_userinterface.S21_step_print = 21 |
State 21 of the user interface task.
Creates an initial state condition for state 21. State 21 prints motor data for the step response.
| int Lab4_task_userinterface.S2_collect_data_1 = 2 |
State 2 of the user interface task.
Creates an initial state condition for state 2. State 2 collects and stores time and encoder 1 position data.
| int Lab4_task_userinterface.S3_collect_data_2 = 3 |
State 3 of the user interface task.
Creates an initial state condition for state 3. State 3 collects and stores time and encoder 2 position data.
| int Lab4_task_userinterface.S4_print_data_1 = 4 |
State 4 of the user interface task.
Creates an initial state condition for state 4. State 4 prints time, position, and delta for encoder 1.
| int Lab4_task_userinterface.S5_print_data_2 = 5 |
State 5 of the user interface task.
Creates an initial state condition for state 5. State 5 prints time, position, and delta for encoder 2.
| int Lab4_task_userinterface.S6_zero_enc_1 = 6 |
State 6 of the user interface task.
Creates an initial state condition for state 6. State 6 sets encoder 1 position to zero.
| int Lab4_task_userinterface.S7_zero_enc_2 = 7 |
State 7 of the user interface task.
Creates an initial state condition for state 7. State 7 sets encoder 2 position to zero.
| int Lab4_task_userinterface.S8_print_enc_pos_1 = 8 |
State 8 of the user interface task.
Creates an initial state condition for state 8. State 8 prints encoder 1 position data.
| int Lab4_task_userinterface.S9_print_enc_pos_2 = 9 |
State 9 of the user interface task.
Creates an initial state condition for state 9. State 9 prints encoder 2 position data.