|
Luisa Chiu Portfolio
|


|
|
Luisa Chiu Portfolio
|
|
Motor task reponsible for motor control. More...
Classes | |
| class | Lab4_task_motor.Task_Motor |
| Motor task that creates variables for motor driver functions and parameters. More... | |
Variables | |
| int | Lab4_task_motor.S1_RUN = 2 |
| State 1 of the motor task. More... | |
| int | Lab4_task_motor.S2_STOP = 1 |
| State 2 of the motor task. More... | |
| int | Lab4_task_motor.S3_FAULT = 3 |
| State 3 of the motor task. More... | |
| int | Lab4_task_motor.S4_CLEAR_FAULT = 4 |
| State 4 of the motor task. More... | |
| int | Lab4_task_motor.S5_STEP_RESPONSE = 5 |
| State 5 of the motor task. More... | |
Motor task reponsible for motor control.
Implements a finite state machine that interacts with the motor and task user interface.
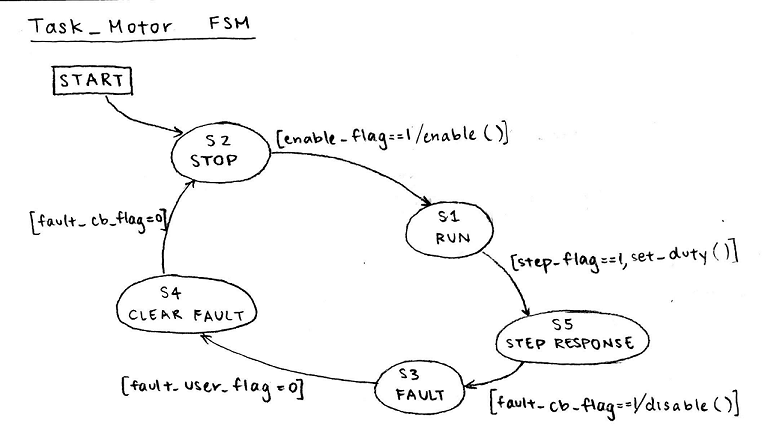
| int Lab4_task_motor.S1_RUN = 2 |
State 1 of the motor task.
Creates an initial state condition for state 1. State 1 is the enable state.
| int Lab4_task_motor.S2_STOP = 1 |
State 2 of the motor task.
Creates an initial state condition for state 2. State 2 is the disable state.
| int Lab4_task_motor.S3_FAULT = 3 |
State 3 of the motor task.
Creates an initial state condition for state 3. State 3 is the fault alert state.
| int Lab4_task_motor.S4_CLEAR_FAULT = 4 |
State 4 of the motor task.
Creates an initial state condition for state 4. State 4 is the clear fault state.
| int Lab4_task_motor.S5_STEP_RESPONSE = 5 |
State 5 of the motor task.
Creates an initial state condition for state 5. State 5 is the step response state.